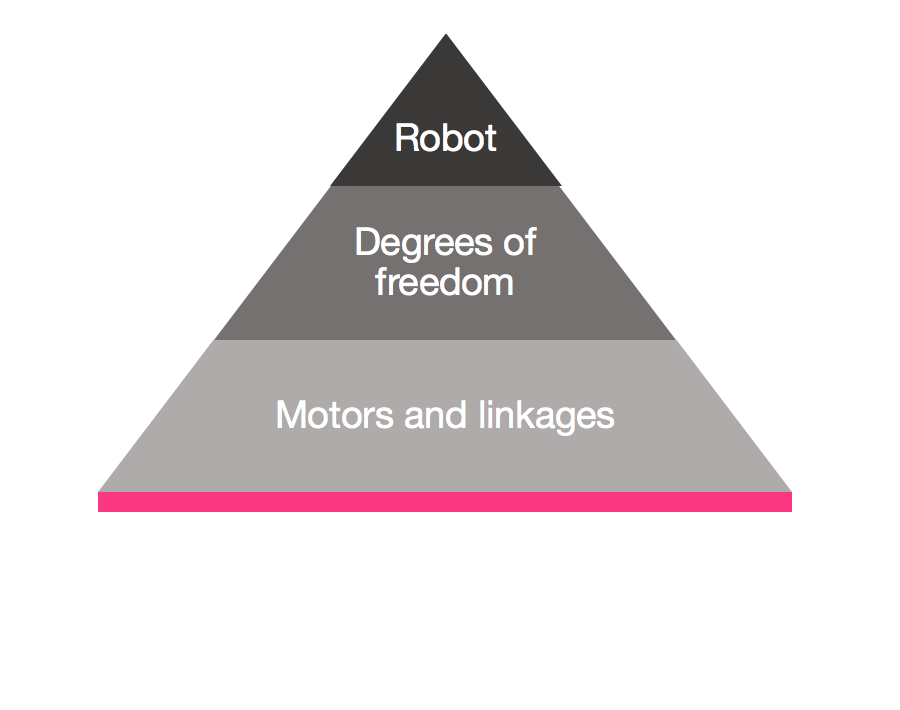
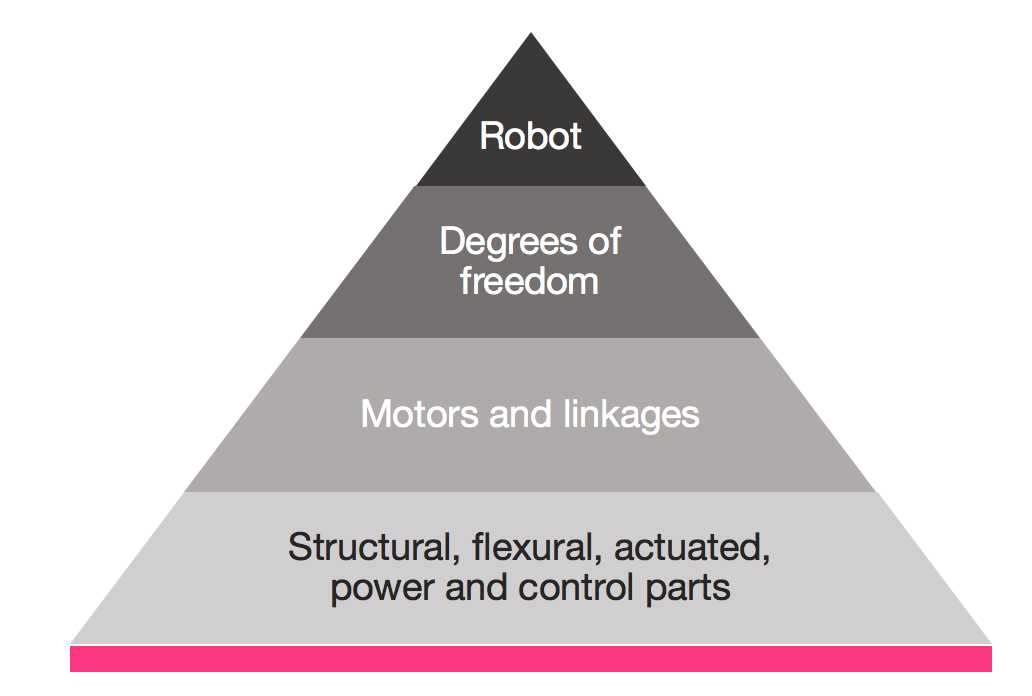
One key contribution of this research will be adding an additional layer of granularity to robotic systems. This is described by the pyramids below. To do this I need to start understanding how to incorporate different part types into a high performance lattice. This page presents work to incorporate a flexural part type.
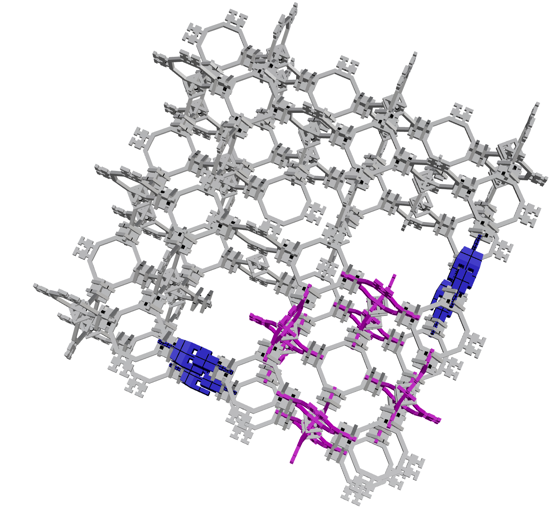
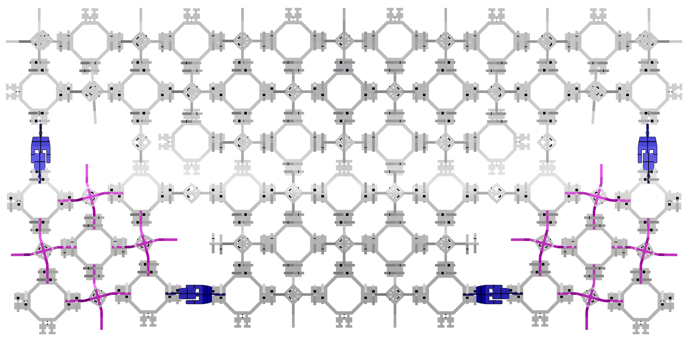
Taking inspiration from Will's work, I started by CADing a Kelvin lattice with flexural parts. The images below show the types of structures that might be possible. Grey = structural part, purple = flexural part and blue = actuation part.
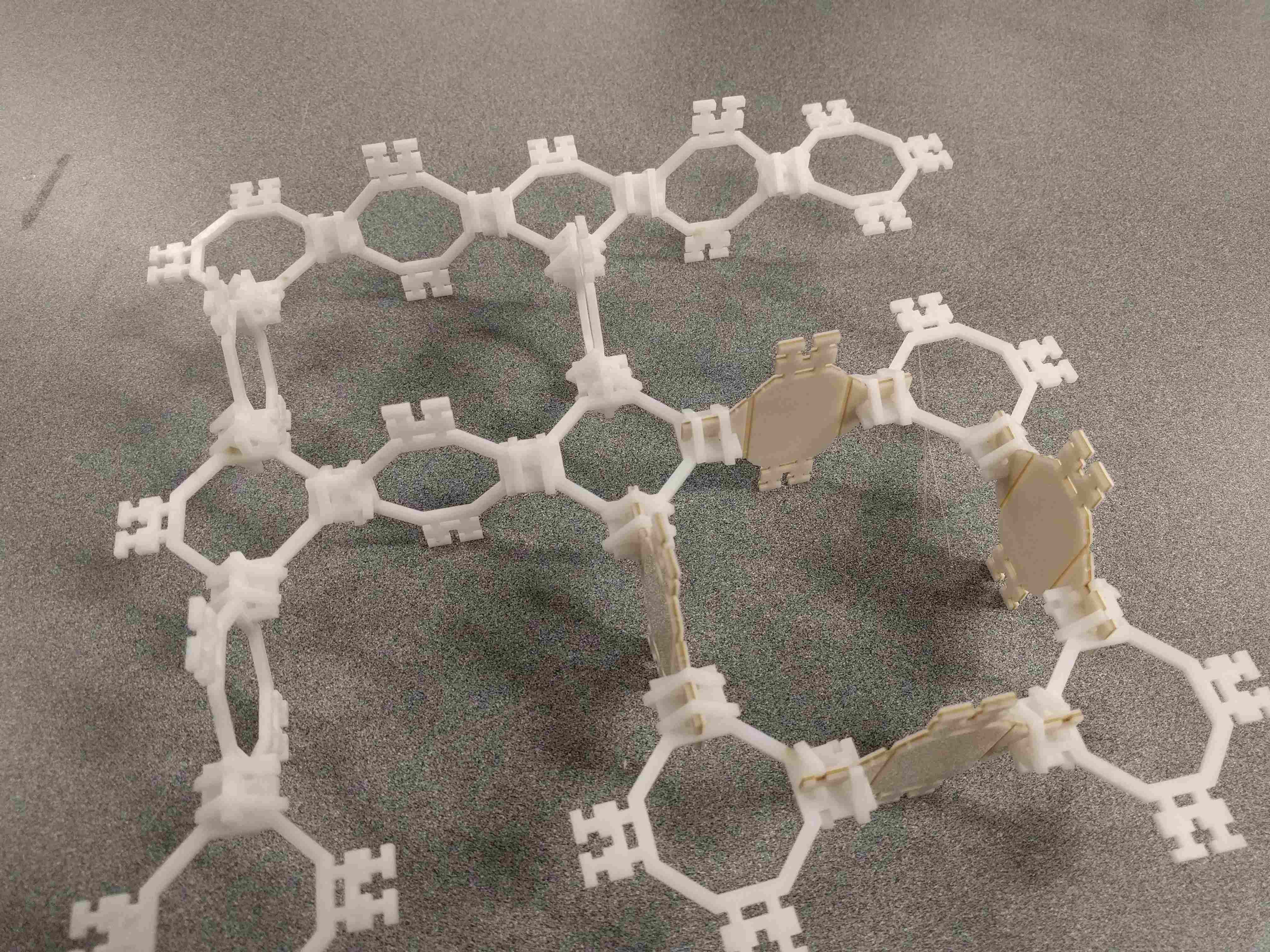
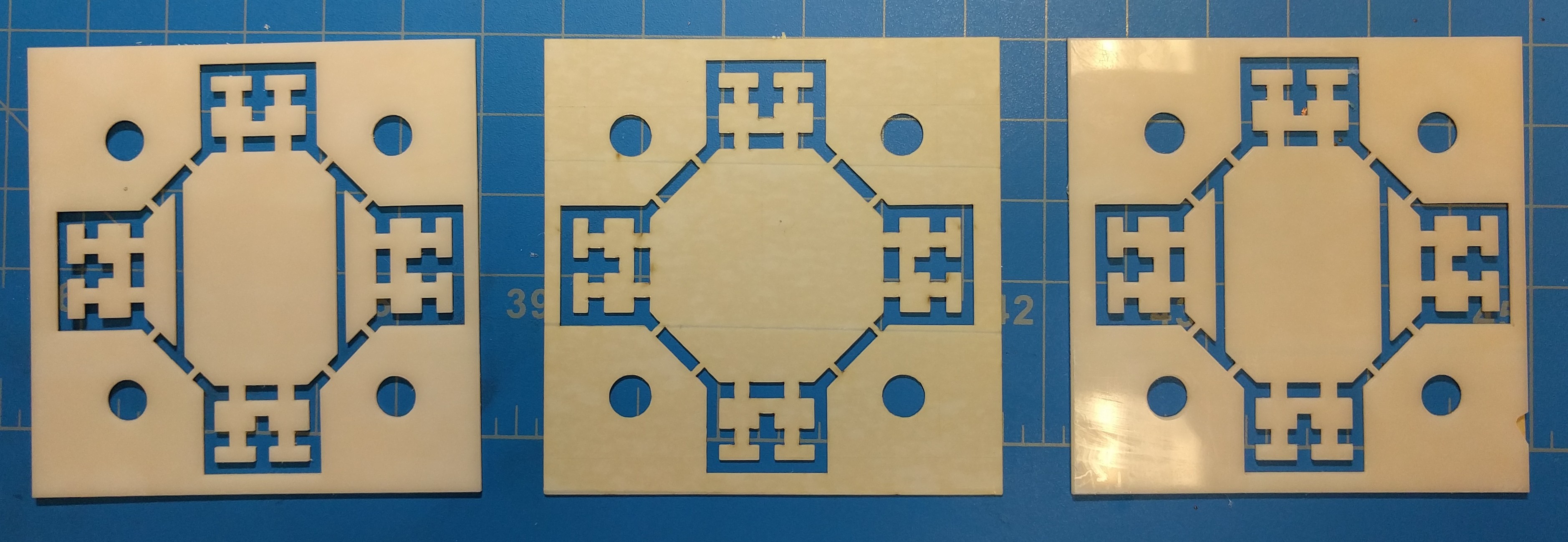
I prototyped the first flexural design using Delrin. You can purchase Delrin in thicknesses of 3/32" and 1/32" which allowed me to make the stuctural parts from the 3/32" and sandwich together two layers of 1/32" with an adhesive+mylar core to create the flexural parts.
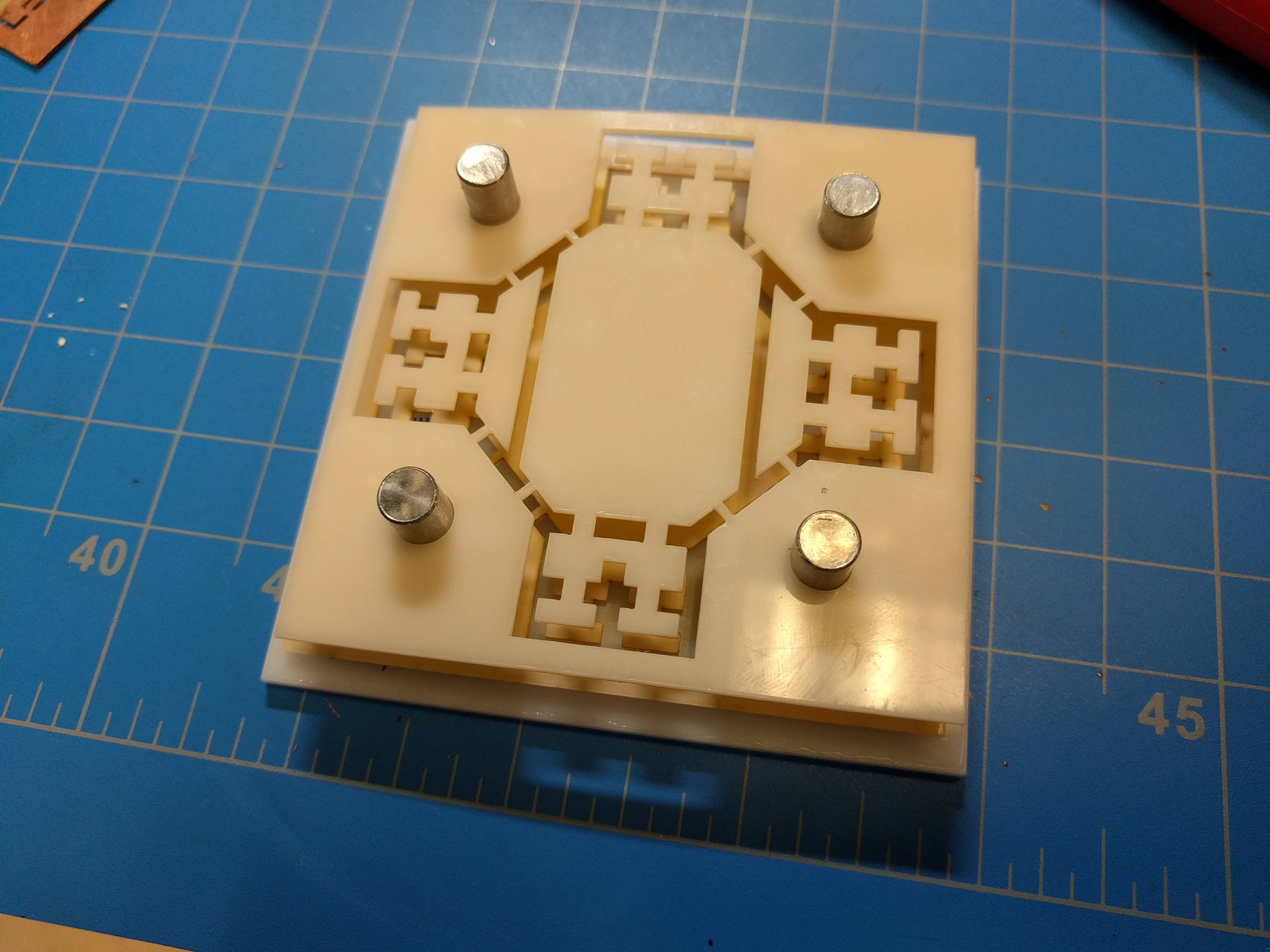
This inital assembly is underconstrained, it needs another layer of parts to fully constrain the mechanism however it gives an idea of how mechanisms can be integrated into the Kelvin lattice.