Challenge
Research into self assembling robotic systems has cumulated in complex modules which are challenging to manufacture at scale and the resulting collective functionality of the self-assembled system is limited. In comparison, whilst full-custom robotic systems have been shown to perform a wide range of high performance capabilities, these systems are not reconfigurable.
This thesis will present an alternative to current configurable systems be decomposing the robotic system to a fine grained level of functionality. In doing so, I will demonstrate that a small number of parts can be used on make many different types of robots.

Approach
- Design the structural system - Interpolate a structural system that sits between the modular electronics currently being developed by Will Langford and the sparse, ultra light, cellular lattices developed by the Coded Structures Lab at the NASA Ames Research Center. The system that is being developed by Will Langford has been optimized in part for automated assembly in support of the goal to scale down to a cell pitch of around 1mm. When scaling up, the density of the structure becomes more important as well as the ease with which you can transition construction between orthogonal planes. For these reasons it becomes necessary to take design aspects of the lattice structures developed by the CSL to create a structural system with a higher specific stiffness and simpler transistions between structural planes.
- Develop a set of parts - Once the structural system has been developed, the kit of parts can be developed. This kit must provide a range of routing functions including communication, power and structural loads. In addition the kit of parts should contain units capable of performing computation and actuation.
- Pick a portfolio of test cases - Begin by choosing some test cases of locomotion and manipulation. This could be based on performing a specific task, or it could be chosen in a way that scales up the complexity of the movement where perhaps swimming requires a 1D linkage, flapping is 2D and walking is 3D.
- Collaborate on the chosen use cases to determine specifications to build towards and metrics to assess performance.
Evaluation
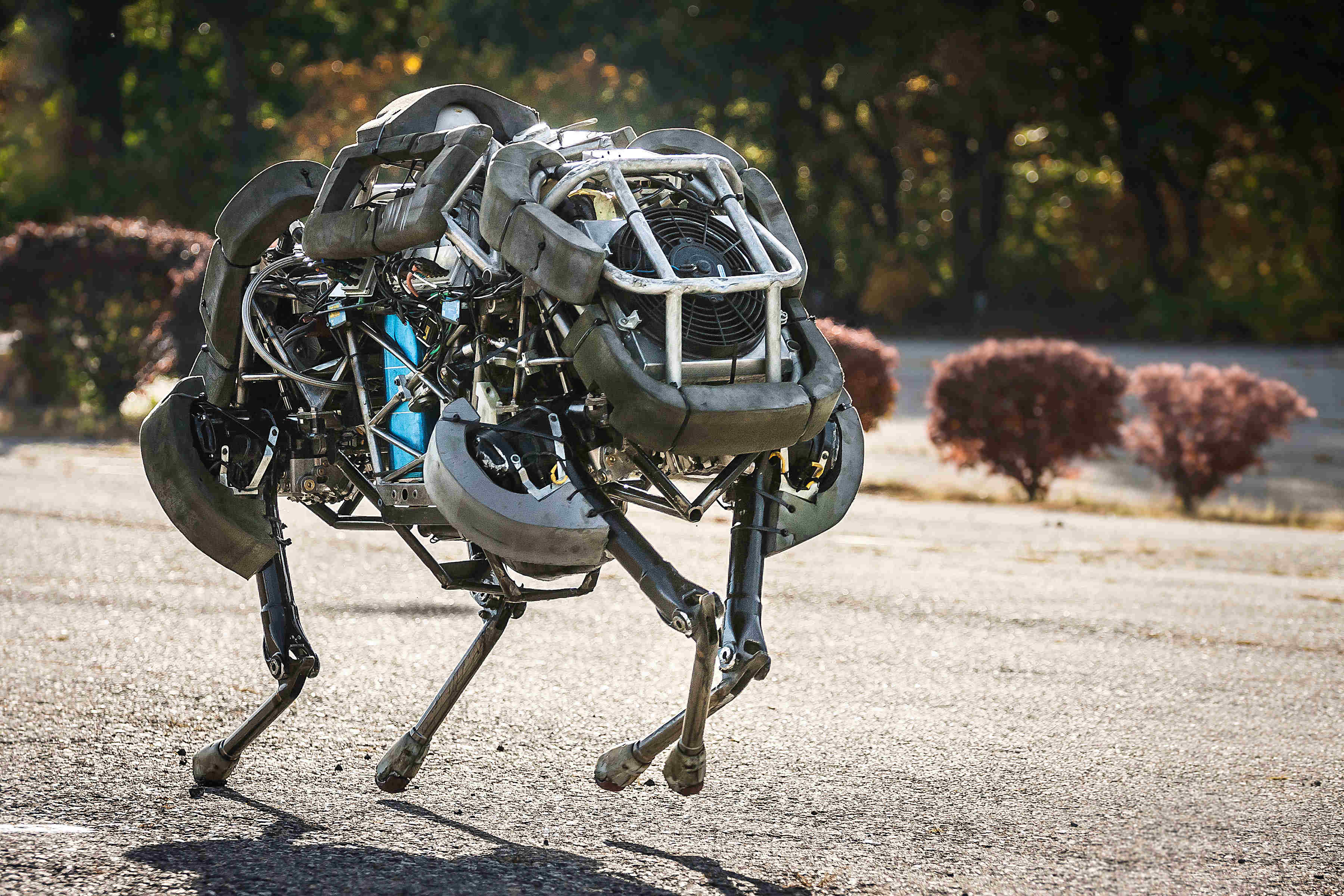
Metric for range of functionality - Compare the range of functionality through reconfiguration with that that's possible with state of the art programmable matter projects or a kit of parts to make Big Dog.
Metric for scalability in terms of production of a single part - How easy is it to make an individual part
Metric for scalability in terms of assembly - Can assembly be automated?
Contributions
Cellular robotics, where a set of parts can generate a range of forms of locomotion. (In CBA world, find a space in between Will type parts at Ben/Kenny scale parts.)
Literature categories
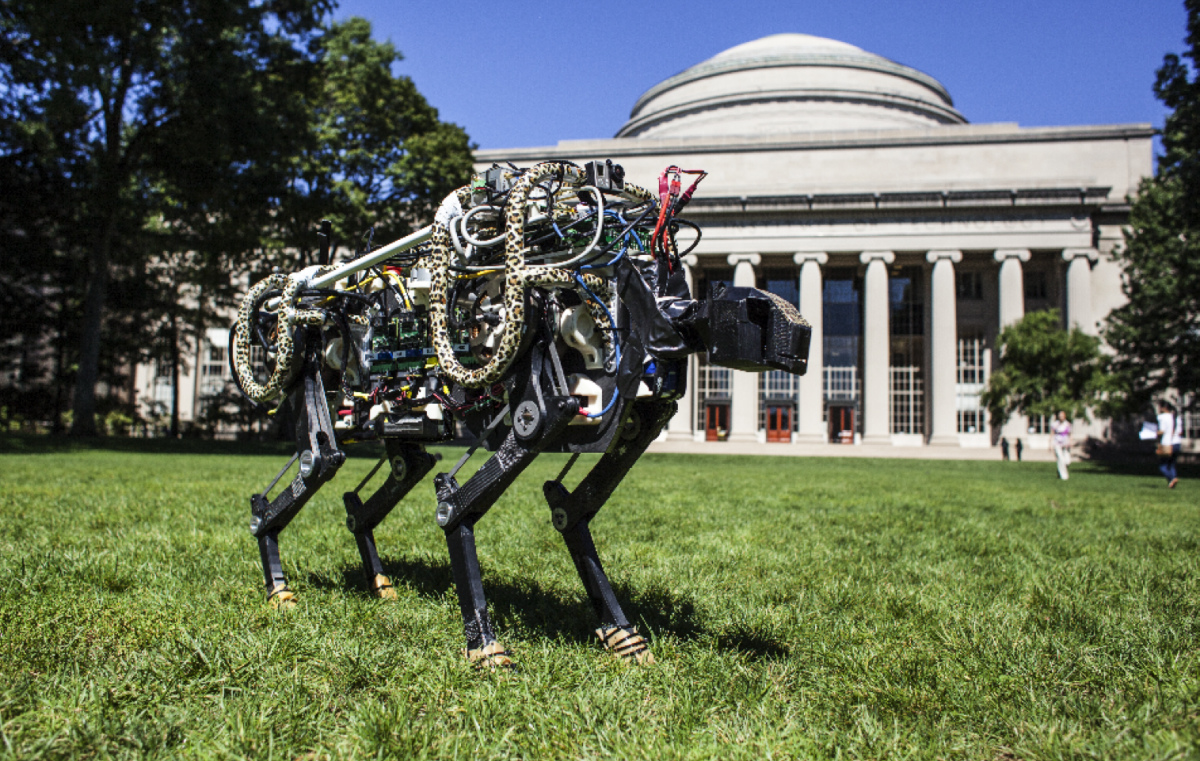
- Custom complex robots such as Big Dog or Sangbae Kim's Cheetah required a host of custom parts. If we're aiming for a couple orders of magnitude lower performance then can we go modular?
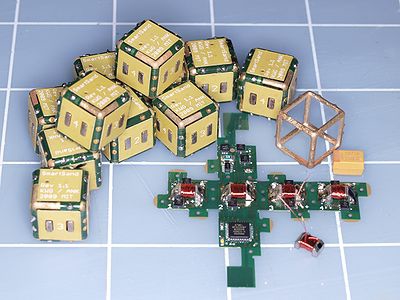
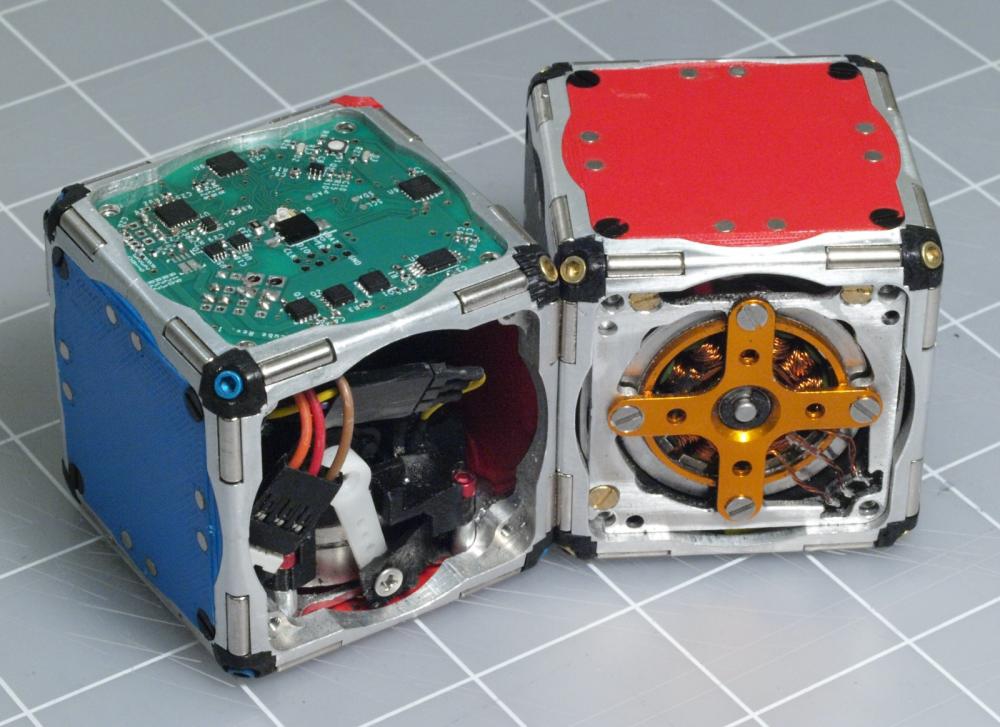
- Modular reconfigurable robots / programmable matter - understand how far they got in terms of reconfigurability for different types of locomotion. Find evidence that the modules ended up becoming as complex as the whole.
- Phonemes for locomotion - what DOFs are required for walking, swimming and flapping and what are the scaling laws that determine their energy requirements, how do these compare the the energy density of available actuators and how does this 2x2 table output a recipe for the required building blocks. Whilst it comes from a field very far from robotics, Laban's analysis of movement helps to describe the different dimensions of movement which might be helpful when picking a portfloio of movements to replicate.
{kind=link}